
NX CAM Robotics – szósta oś, konfiguracje i osobliwości kinematyki
W dzisiejszych czasach roboty coraz częściej zastępują ludzi i inne maszyny. W poniższym artykule przedstawię kilka zagadnień związanych z programowaniem robotów, które nie pojawiają się w pracy na obrabiarkach.
Ścieżkę narzędzia dla robota przemysłowego w systemie NX CAM programuje się tak samo, jak dla obrabiarki pięcioosiowej. Te same operacje mogą być wykonane na obrabiarce lub robocie, robot jest wówczas traktowany jak kolejna obrabiarka. Jednak ze względu na specyfikę robota, można ustalić dodatkowe reguły, których będzie się on trzymał. Poniżej omówione zostaną pojęcia charakterystyczne dla robotów przemysłowych, potrzebne do ustawienia reguł.
Szósta oś
Wiemy z fizyki, że istnieje sześć stopni swobody ciała sztywnego: jego przemieszczanie w trzech wymiarach przestrzeni i obrót wokół trzech osi. Dlaczego zatem obrabiarki do obróbki skrawaniem są „tylko” pięcioosiowe?
Otóż wynika to z okrągłości narzędzi. Frez ma uchwyt i część skrawającą, ale nie ma strony lewej czy prawej, przodu czy tyłu. Dla kontrastu rozważmy obrabiarkę z orientacją wrzeciona – wykorzystywaną przy wytaczaniu z odskokiem (G86), zorientowanym zatrzymaniu (M19), a zwłaszcza gwintowaniu „na sztywno”. Obrabiarka taka potrafi „wytoczyć” gwint nożem tokarskim zamocowanym we wrzecionie, poruszając się po linii śrubowej, podczas gdy ostrze noża utrzymywane jest wzdłuż promienia gwintu. W tym trybie pracy maszyna ma sterowane sześć osi, ustawienie kątowe narzędzia wokół jego osi jest bardzo istotne. Przy zwykłym frezowaniu to ustawienie nie ma znaczenia, dlatego obrabiarki są pięcioosiowe.
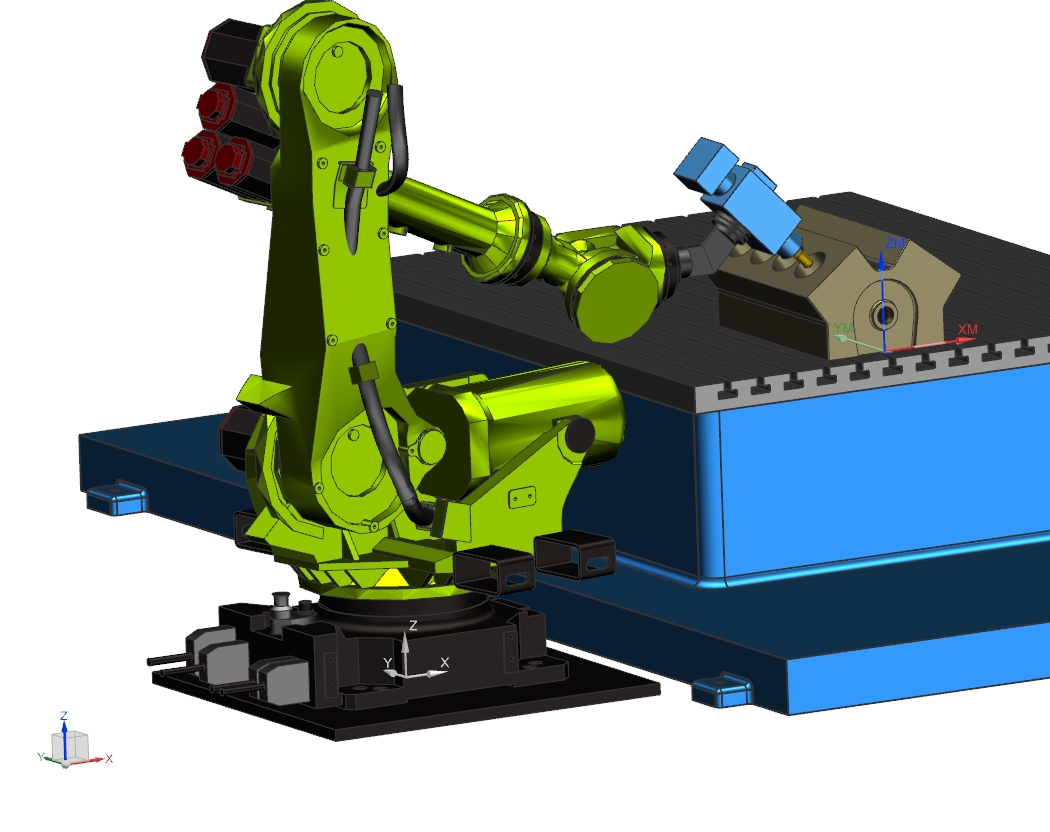
Robot przemysłowy może mieć zamocowane na końcu ramienia dowolne oprzyrządowanie, nie tylko okrągłe narzędzia. Nawet jeśli jest używany do frezowania, to na końcu ramienia montuje się wrzeciono, którego oś może być pod dowolnym kątem. Wszystkie sześć przegubów robota jest używanych do ustalania położenia i orientacji narzędzia w przestrzeni, nie do jego napędu.
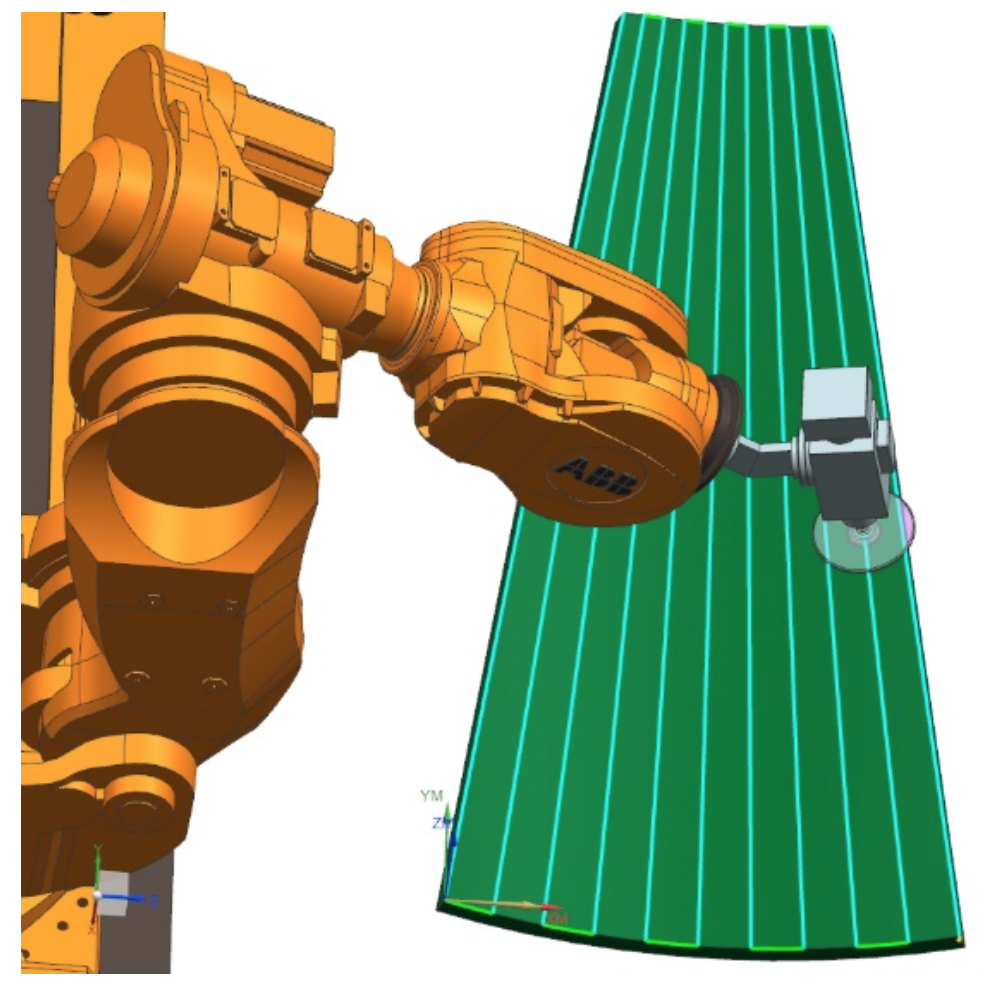
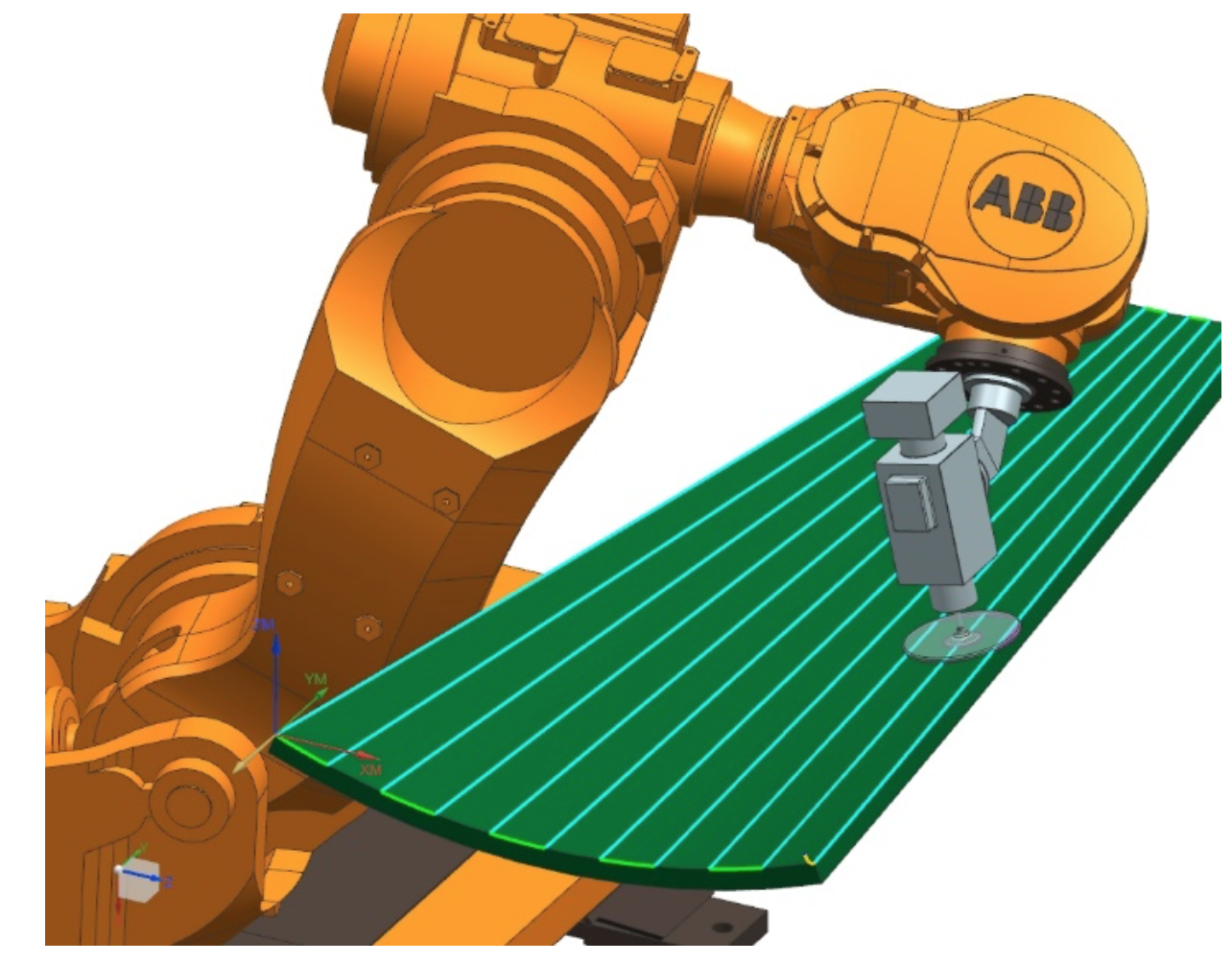
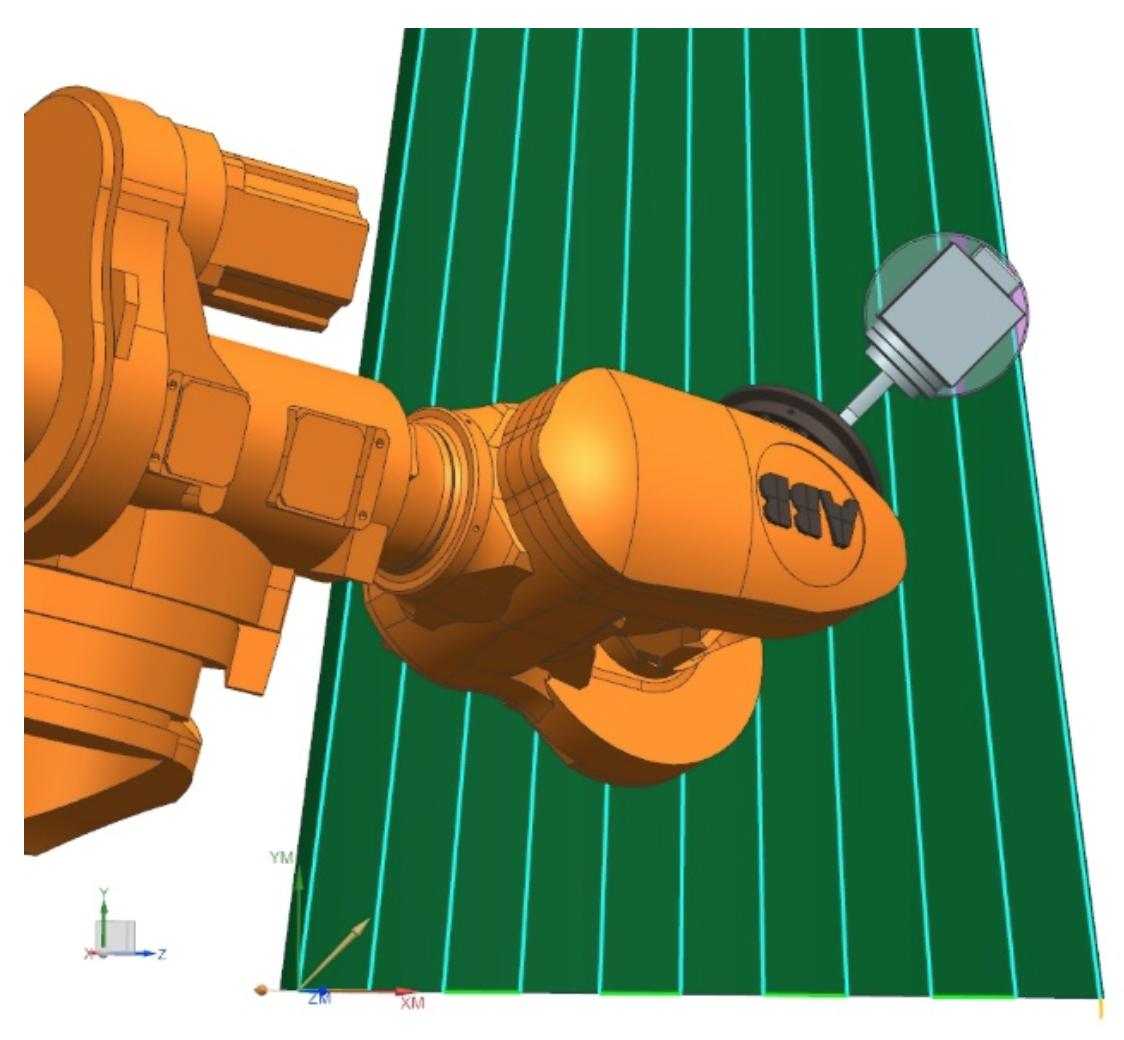
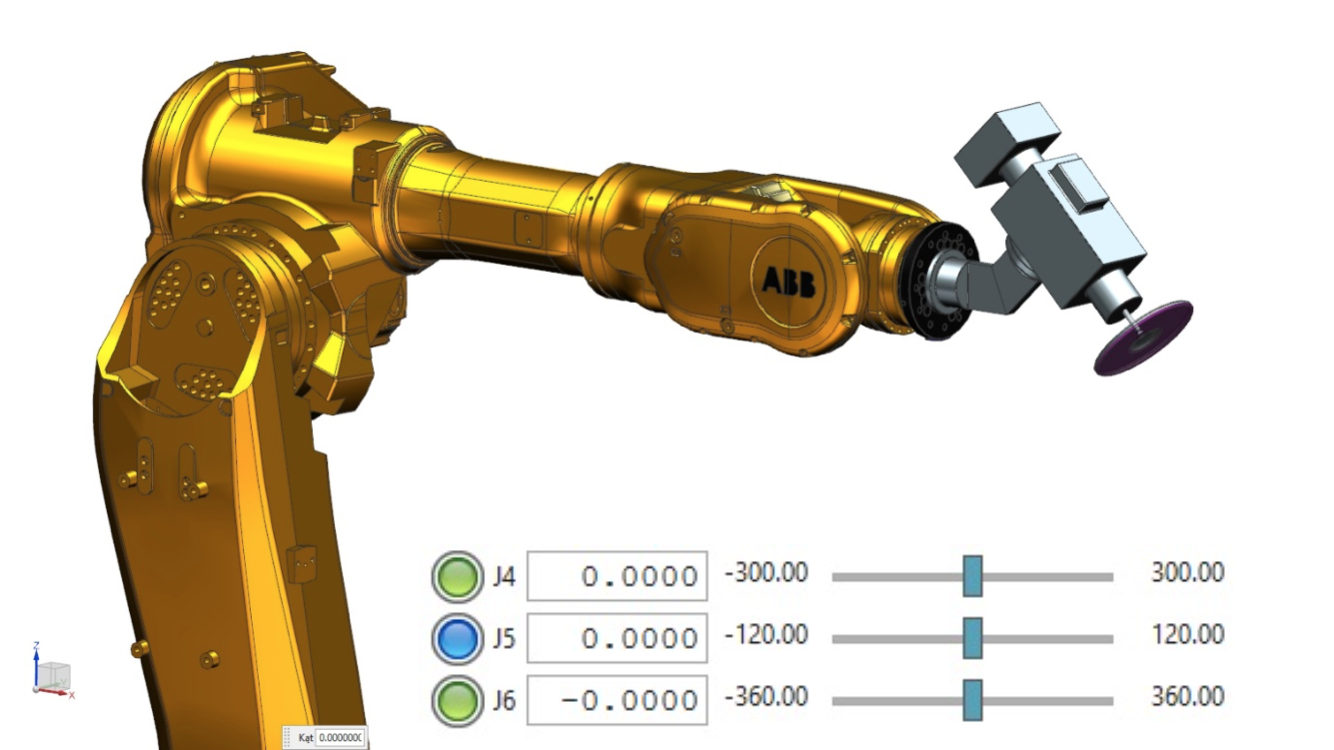
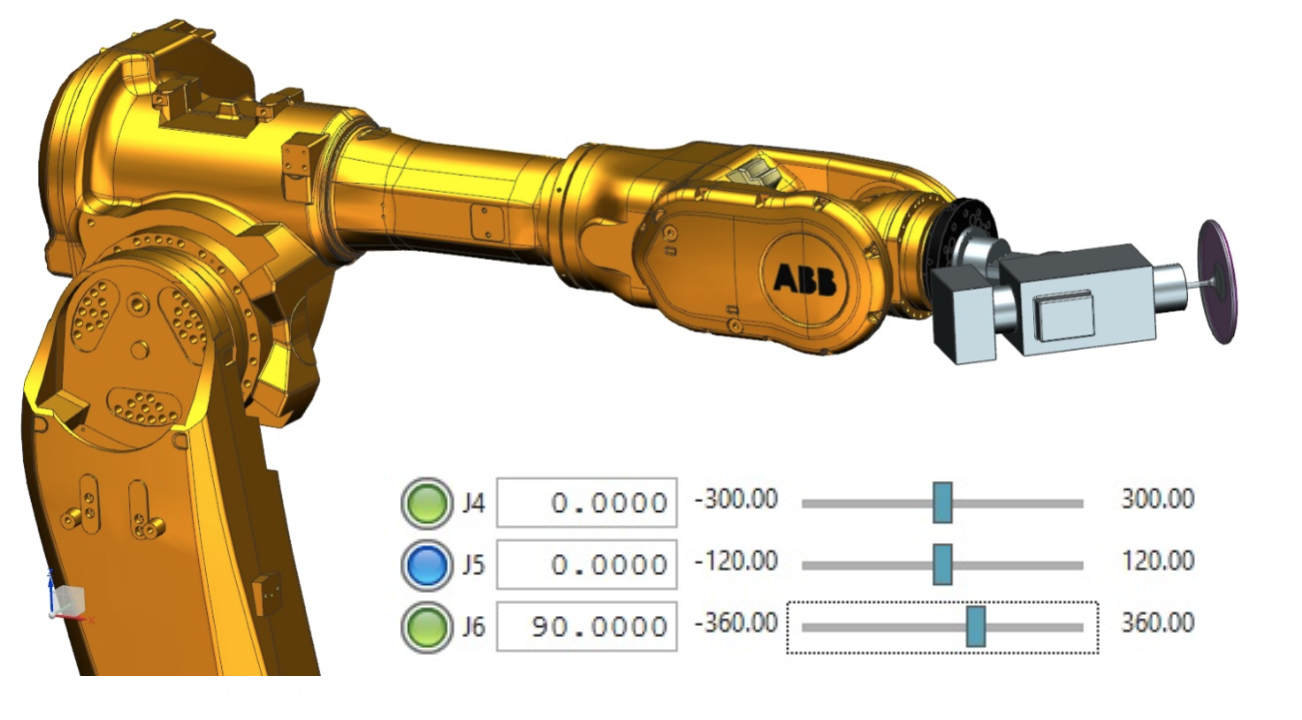
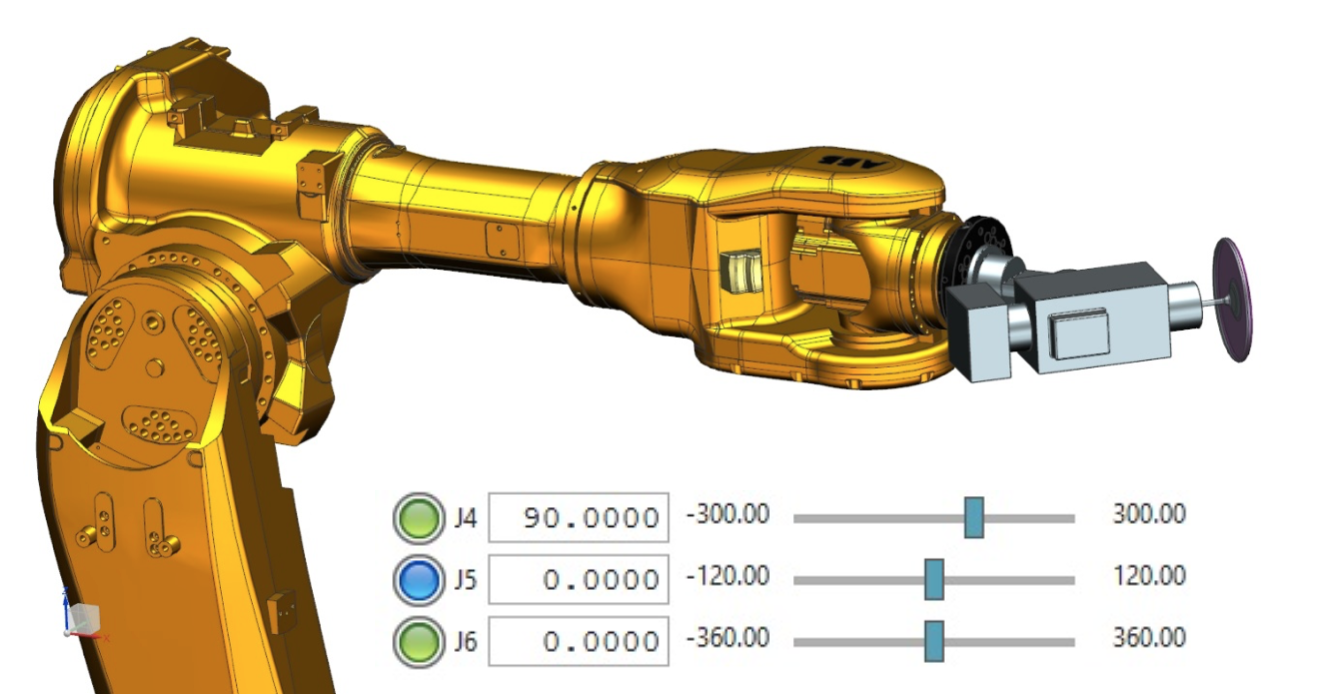
System NX CAM generuje uniwersalną pięcioosiową ścieżkę narzędzia, ale dla robota możemy (nie musimy) ustalić kąt względem osi narzędzia. Na rysunkach 1, 2 i 3 widzimy różne ustawienia wrzeciona dla tej samej ścieżki. Może być ono stałe względem układu współrzędnych lub stałe względem ścieżki (wówczas podąża za kierunkiem ścieżki zmieniając się względem układu).
Mówiliśmy o szóstej osi w sensie szóstego stopnia swobody albo obrotu narzędzia względem samego siebie.
Przeguby robota są numerowane od 1 (obrotowa podstawa robota) do 6 (obrót kołnierza mocującego na końcu ramienia). Poniżej „szósta oś” oznacza obrót kołnierza mocującego.
Konfiguracje ramienia
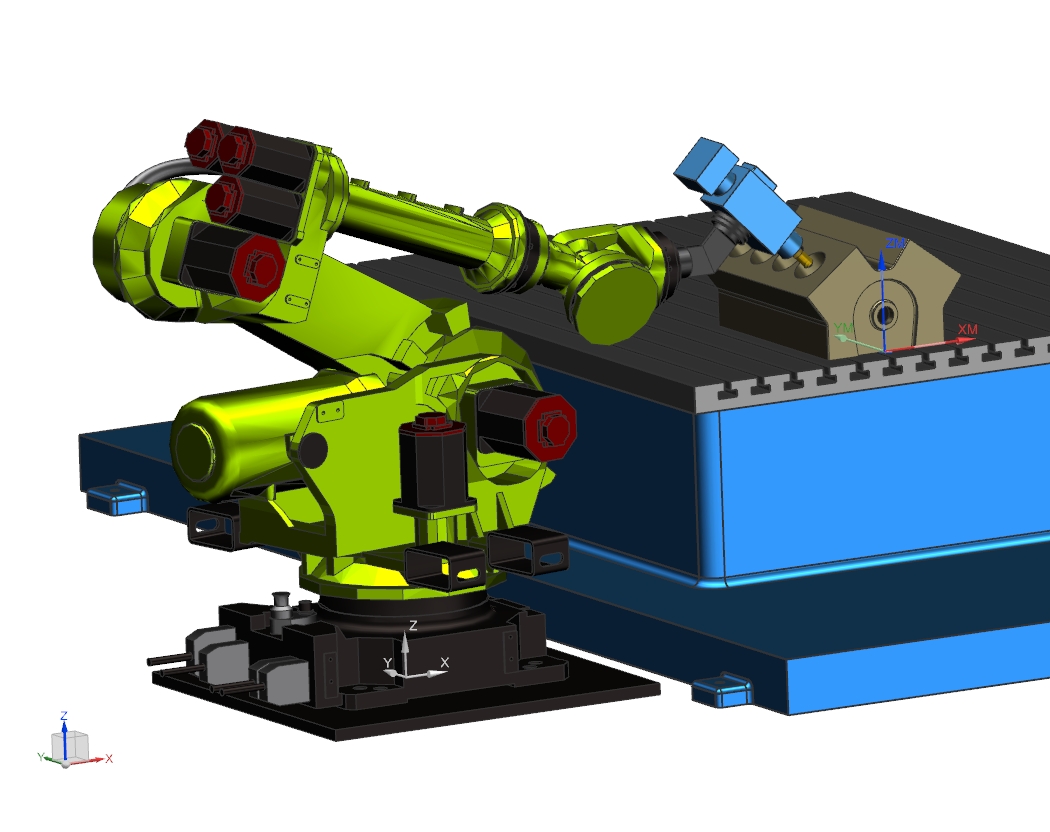
Obrabiarki ze stołem uchylno-obrotowym mają dwie możliwości ustawienia stołów, aby uzyskać zadane położenie kątowe narzędzia względem części: wychylając stół do przodu lub do wnętrza maszyny i dostosowując do tego stół obrotowy i osie liniowe. Podobnie jest w przypadku robota. Dany punkt w przestrzeni i orientację narzędzia można osiągnąć na wiele sposobów, maksymalnie osiem. Konfigurację zadajemy decydując, czy kąty pierwszego, trzeciego i piątego przegubu mają być dodatnie czy ujemne. Pozostałe przeguby się dostosowują. Na rysunkach 4 i 5 ukazano dwa ułożenia ramienia robota różniące się obrotem względem podstawy.
Osobliwości kinematyki
Możliwe jest takie ułożenie segmentów ramienia robota, w którym ruch przegubów nie powoduje zmiany położenia narzędzia. Inaczej mówiąc, to samo położenie narzędzia jest możliwe przy różnych ustawieniach przegubów w tej samej konfiguracji. Przedstawiono to na rysunkach od 6 do 9. Silniki osi czwartej i szóstej mogą pracować, a mimo tego położenie narzędzia się nie zmieni. W miejscach osobliwych trudno jest wyliczyć położenia segmentów ramienia od narzędzia do podstawy (odwrotne zagadnienie kinematyki).
Poza miejscami osobliwymi zmiana współrzędnych którejś z osi zmienia położenie narzędzia. Generalnie należy unikać miejsc osobliwych. W NX CAM Robotics są one oznaczane niebieskim kolorem przy odpowiedniej osi.
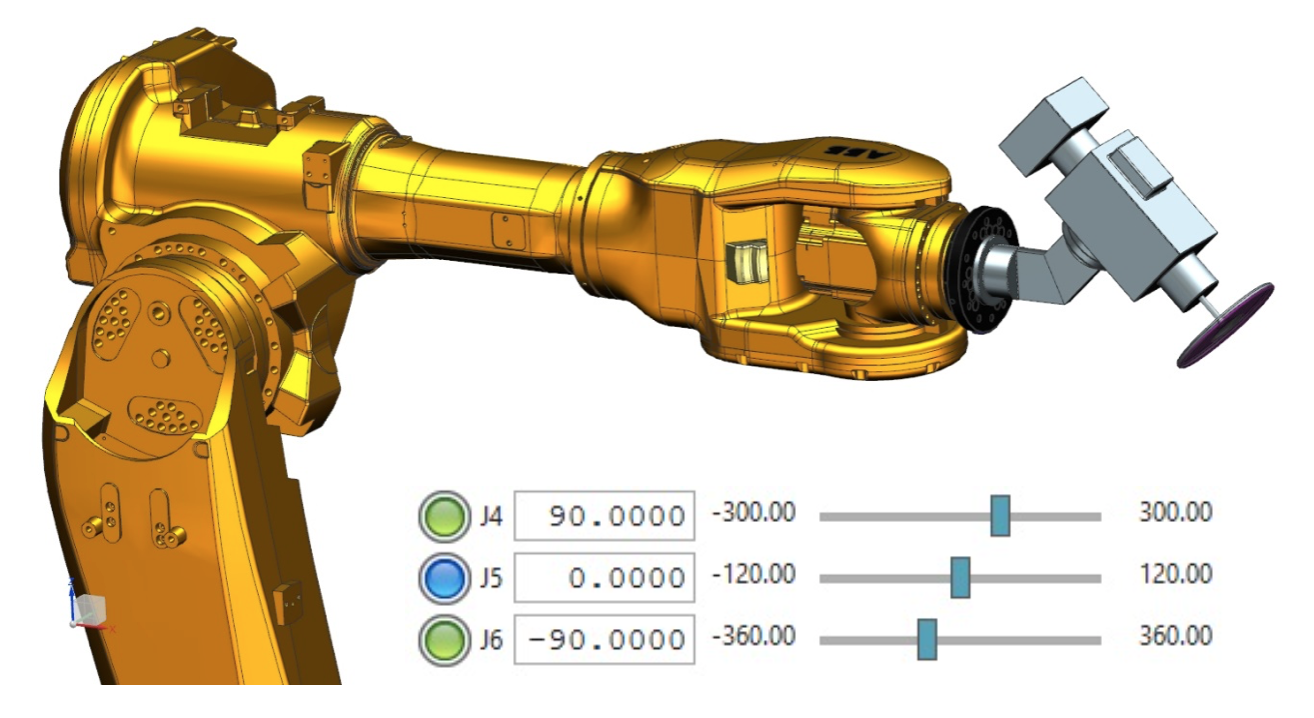
W powyższych przykładach rozwiązaniem problemu jest „ruszenie” piątej osi, aby nie była ona zerowa. To jej ustawienie powoduje, że oś czwarta i szósta są współliniowe, co nie powinno mieć miejsca.
Reasumując, ilość dodatkowych pojęć potrzebnych do programowania robotów jest niewielka w porównaniu do wiedzy umożliwiającej programowanie obrabiarek w systemie NX CAM. Dzięki temu, doświadczony użytkownik może szybko przejść do NX CAM Robotics i efektywnie programować roboty.
Więcej informacji na temat efektywnego programowania robotów przemysłowych off-line i symulacji ich pracy w systemie NX CAM Robotics przedstawiliśmy podczas specjalnego webinaru. Nagranie dostępne na naszym kanale YouTube. Zapraszamy!
Opracował
Marek Osipowicz
web@gmsystem.pl