
Definiowanie narzędzi 3D w NX CAM – narzędzia obrotowe
W systemie NX CAM istnieje możliwość rozbudowy biblioteki narzędzi o modele bryłowe 3D, reprezentujące rzeczywistą geometrię stosowanych narzędzi skrawających. Definiowanie narzędzi 3D w NX CAM jest szczególnie przydatne w przypadku narzędzi specjalnych o niestandardowych kształtach obszaru roboczego jak i oprawki, gdy chcemy widzieć „rzeczywiste” narzędzie podczas symulacji obróbki. W niniejszym artykule przedstawimy metodę dodawania do biblioteki brył 3D narzędzi obrotowych, czyli frezów i wierteł.
Definiowanie narzędzi 3D w NX CAM: przygotowanie złożenia narzędzia i oprawki
Pierwszym krokiem jest wczytanie bryły 3D narzędzia i oprawki. Może ona zostać zamodelowana w systemie NX lub pochodzić np. od producenta lub dostawcy narzędzi. Model taki może mieć różną strukturę i zawierać wiele obiektów bryłowych. Na jego podstawie należy utworzyć złożenie składające się z co najmniej dwóch komponentów. Plik złożenia musi mieć nazwę unikalną, która będzie wykorzystana w bibliotece jako nazwa narzędzia. Pierwszy komponent zawierał będzie narzędzie, w którym bryła części skrawającej jest oddzielona od jego pozostałej części (trzonka). Drugi i ewentualnie kolejne przeznaczone są na geometrię oprawki i pozostałe elementy narzędzia. W pliku złożenia nie powinna pozostać żadna bryła. Przeniesienia brył do plików odpowiednich komponentów można wygodnie dokonać już podczas ich tworzenia w złożeniu, za pomocą opcji okna dialogowego (rys. 1).
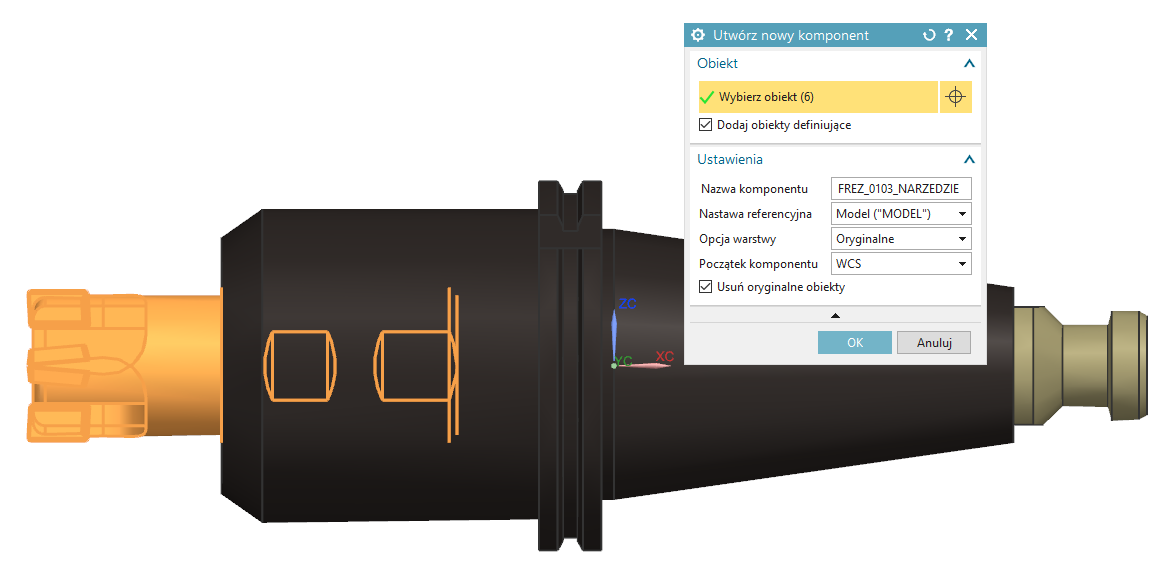
Rys. 1. Zaznaczanie brył narzędzia podczas tworzenia komponentu złożenia
Po zdefiniowaniu wszystkich niezbędnych komponentów w Nawigatorze złożeń powinna powstać prawidłowa struktura złożenia narzędzia (rys. 2).
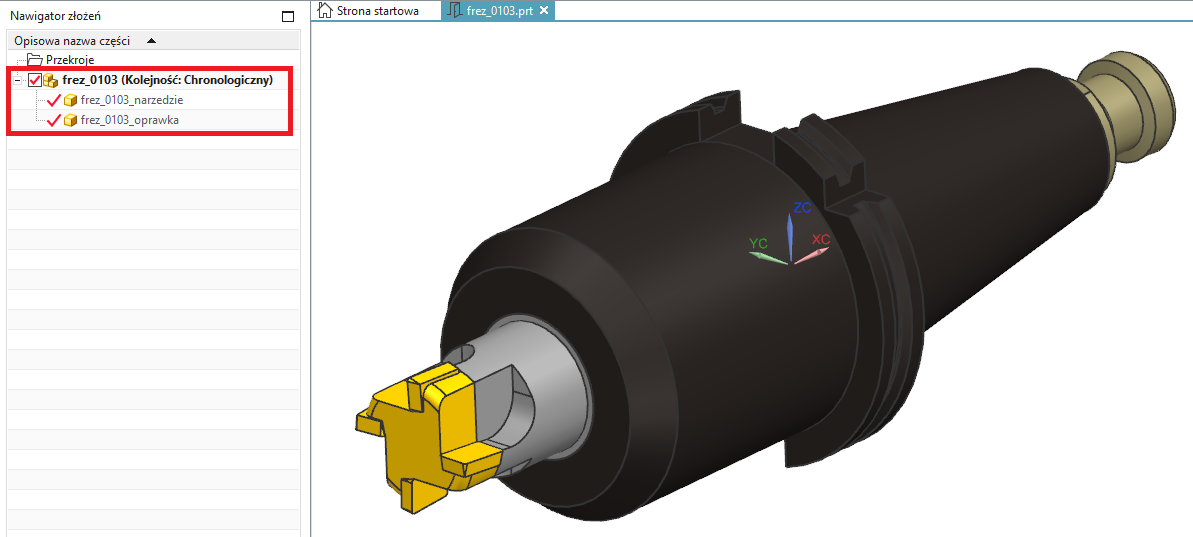
Rys. 2. Struktura utworzonego złożenia narzędzia 3D
Zaleca się, aby bryły znajdujące się w poszczególnych plikach złożenia posiadały odpowiednią orientację w globalnym układzie współrzędnych:
– W pliku narzędzia jego geometria powinna być podzielona na dwie bryły (część skrawająca i pozostała). Oś narzędzia powinna być zgodna z osią X, a jego wierzchołek powinien znajdować się w punkcie zerowym globalnego układu współrzędnych (rys. 3). Jeśli w edytowanym pliku nie ma pomocniczego układu współrzędnych ustawionego zgodnie z układem globalnym, to warto go utworzyć dla ułatwienia późniejszego wskazywania orientacji narzędzia.
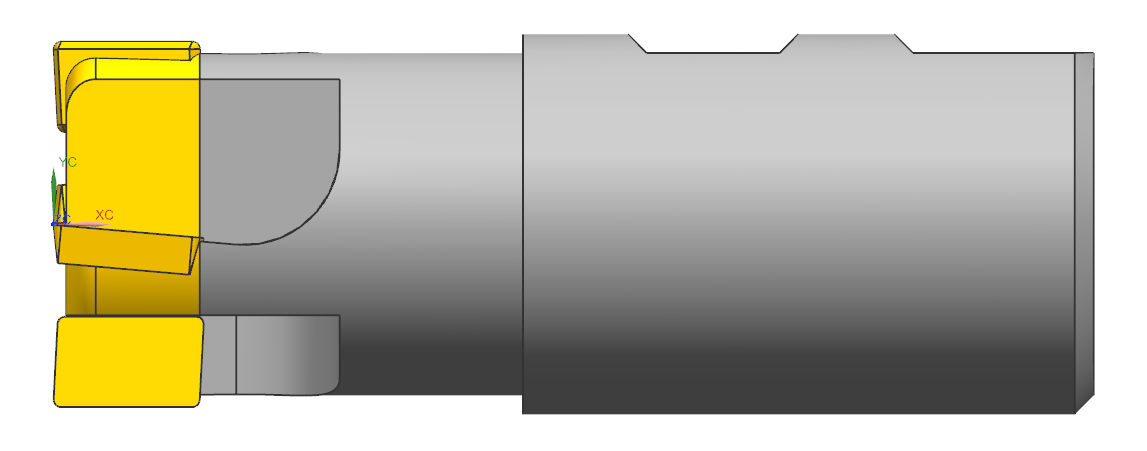
Rys. 3. Geometria narzędzia prawidłowo zorientowana w układzie współrzędnych
W pliku oprawki jej geometria powinna również być zorientowana zgodnie z osią X, natomiast w punkcie zerowym układu współrzędnych powinien znaleźć się punkt mocowania oprawki we wrzecionie obrabiarki. Ten sam punkt należy użyć do określenia pozycji oprawki w złożeniu (rys. 4).

Rys. 4. Prawidłowo zorientowana geometria złożenia narzędzia
Po dokonaniu zmian w orientacji brył w plikach komponentów należy zawsze zweryfikować prawidłowość położenia narzędzia względem oprawki.
Definiowanie narzędzia parametrycznego
Narzędzie w postaci przygotowanego wcześniej złożenia będzie wykorzystywane tylko podczas symulacji obróbki, natomiast do prawidłowego generowania ścieżek operacji obróbczych konieczne jest zdefiniowanie narzędzia parametrycznego. W tym celu w środowisku Wytwarzania tworzymy nowe narzędzie. W oknie dialogowym ustawiamy parametry narzędzia i oprawki tak, aby jak najdokładniej odpowiadały rzeczywistym kształtom znajdującym się poniżej punktu mocowania oprawki. Jest to niezwykle istotne ze względu na to, że geometria ta będzie wykorzystywana podczas generowania bezkolizyjnych ścieżek narzędzia (rys. 5).
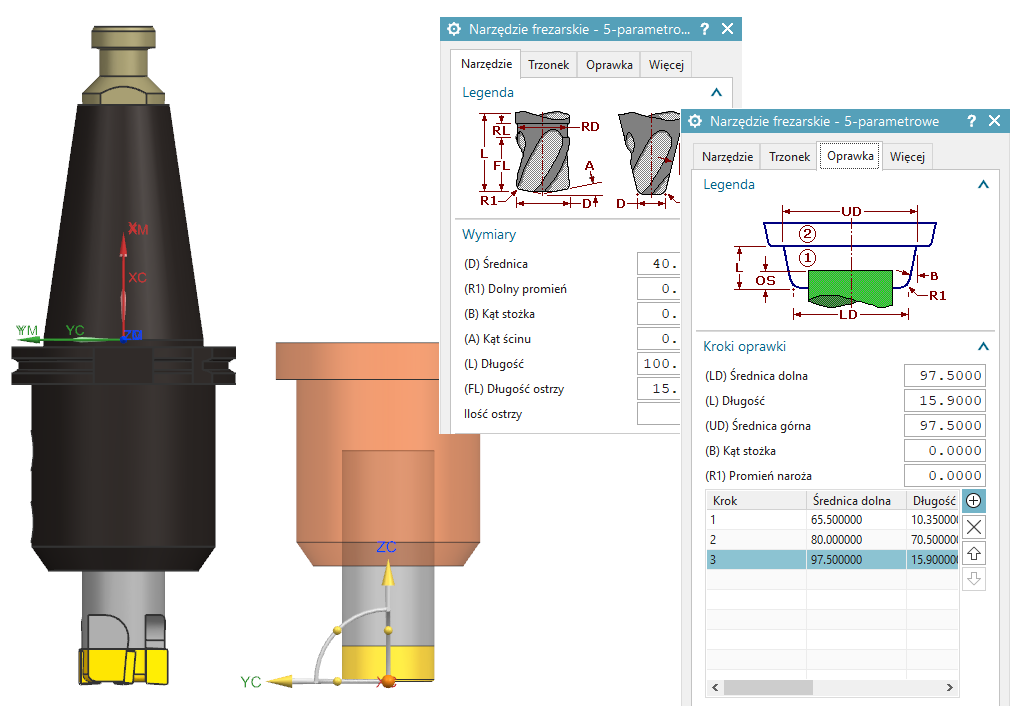
Rys. 5. Definiowanie narzędzia parametrycznego NX CAM
Definiowanie narzędzi 3D: zapisywanie narzędzia w bibliotece NX CAM
W oknie dialogowym tworzenia narzędzia parametrycznego wpisujemy 0 (zero) w pozycji Numer narzędzia T. Następnie rozwijamy grupę Biblioteka i wpisujemy oznaczenie narzędzia w bibliotece. Powinna to być ta sama nazwa, jakiej użyliśmy dla złożenia narzędzia. Zaznaczamy opcję Eksportuj plik części narzędzia, a po pojawieniu się nowych pozycji wskazujemy kolejno: układ współrzędnych oprawki (mocowanie), układ współrzędnych narzędzia (ostrze) oraz bryłę części tnącej narzędzia (rys. 6). Osie X obu układów powinny być zgodne z osią obrotową narzędzia.
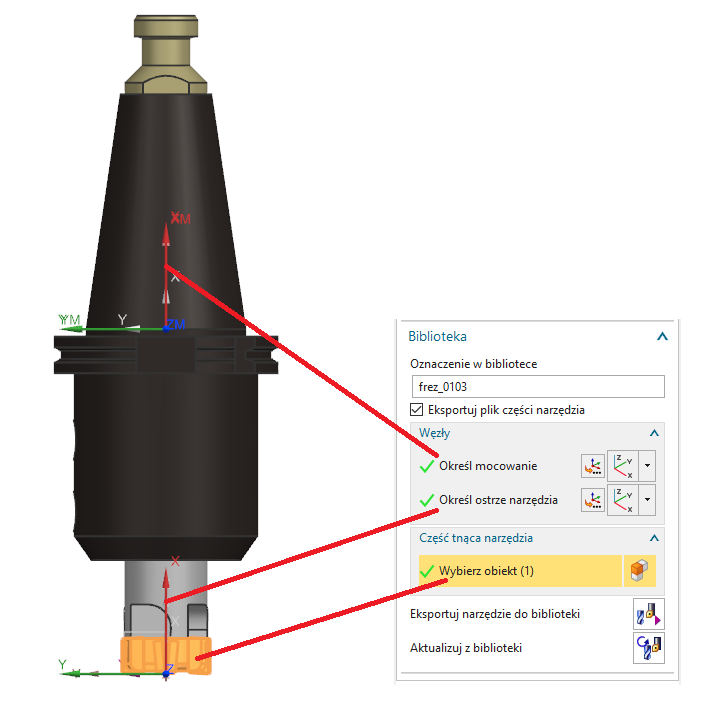
Rys. 6. Definiowanie elementów złożenia narzędzia podczas zapisu do biblioteki
Aby skorzystać z pomocniczych układów współrzędnych występujących w plikach składowych narzędzia, konieczna jest zmiana referencji wyświetlania komponentów z Model na Cała część (rys. 7).
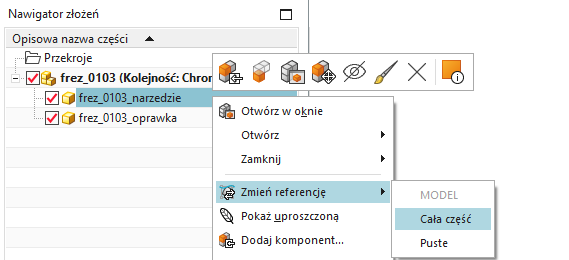
Rys. 7. Zmiana referencji wyświetlania komponentów złożenia
Po zaznaczeniu wszystkich elementów uruchamiamy polecenie Eksportuj narzędzie do biblioteki i opcjonalnie wybieramy klasę narzędzia oraz system mocowania. Po zakończeniu eksportu program wyświetla komunikat potwierdzający zapisanie w bibliotece plików narzędzia i oprawki. Pliki narzędzia 3D (złożenie) zostają zapisane w podfolderze biblioteki narzędzi …MACHresourcelibrarytoolgraphics, natomiast parametryczne narzędzie i oprawka są zapisywane do standardowej biblioteki narzędzi NX CAM. Bieżący plik złożenia narzędzie można zamknąć bez zapisywania, gdyż wszystkie niezbędne informacje znajdują się już w bibliotece.
Korzystanie ze złożenia narzędzia 3D
Narzędzie bryłowe 3D (złożenie narzędzia), powiązane z narzędziem parametrycznym, wykorzystanym w operacjach obróbczych, możemy przywołać na potrzeby symulacji procesu. W oknie dialogowym weryfikacji ścieżki narzędzia należy wybrać odpowiednią opcję wyświetlania narzędzia, natomiast podczas symulacji pracy obrabiarki rodzaj narzędzia zmienia się w Ustawieniach symulacji (rys. 8).
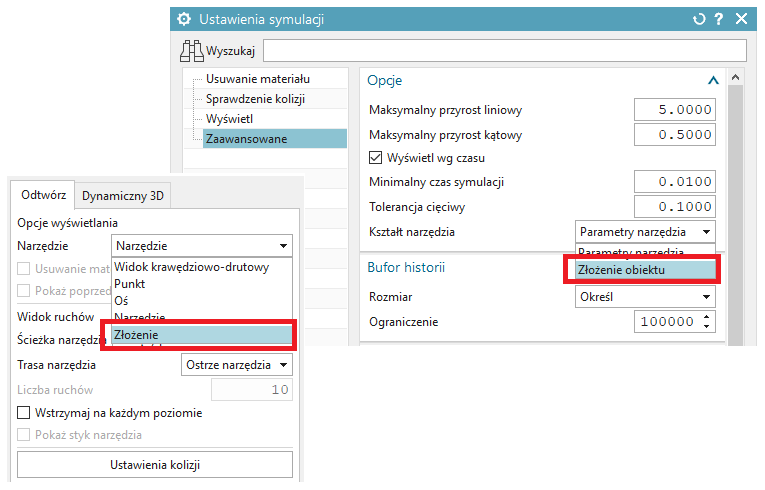
Rys. 8. Wybór złożenia narzędzia podczas weryfikacji ścieżek oraz symulacji pracy obrabiarki
W efekcie uzyskujemy symulację z wizualizacją modelu 3D narzędzia (rys. 9). Podczas tego typu symulacji mechanizm wykrywania kolizji będzie sprawdzał poprawność obróbki z uwzględnieniem wszystkich komponentów wczytanego złożenia narzędzia 3D, co ma duże znaczenie w przypadku narzędzi o skomplikowanej budowie, którą trudno odzwierciedlić w narzędziu parametrycznym.
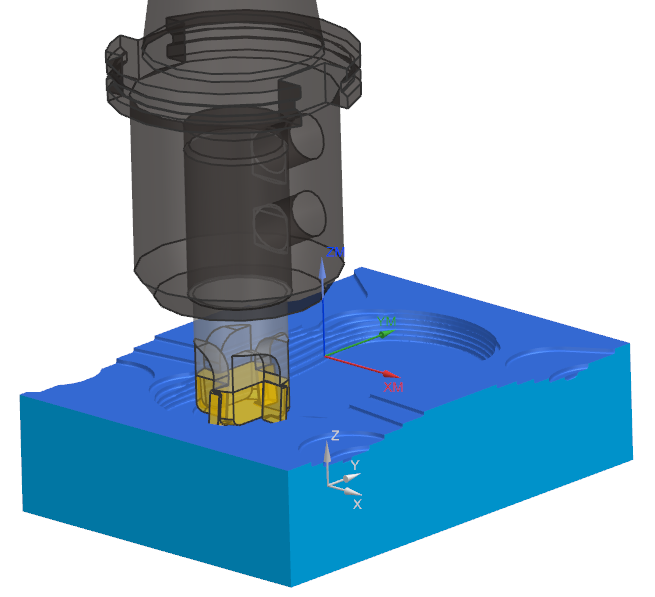
Rys. 9. Symulacja obróbki z wykorzystaniem złożenia narzędzia
Opracował: Piotr Menchen